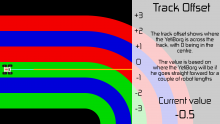
Working out where the track is going next.
We now turn our calculated points into position information.
A quick explanation of how to use the PerformProcessingStage function
PerformProcessingStage
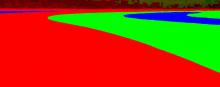
Find out how we go from our lane images to points we can work with
Instructions for how you can setup a standard SD card image for the Winter 2016 Formula Pi series.
For MonsterBorgs follow the Standard Formula Pi SD card image - Monster series guide instead.
Find out how we use the camera image to see where the track lanes are.
Here we explain how the YetiBorg can detect other robots are in front so that it can overtake them.
Here are some videos of our overtaking logic in action
Here we explain how we can handle being flipped over, and how to detect it has happened.
Here is how we tell that a YetiBorg has crashed from just the Pi camera image.