
Track 1 layout

The center line for this track is about 22.9 meters long, with an outside length of 28.6 meters and an inside length of 17.1 meters.
The standard running direction has red on the left of the robots, green on the right.
Here we have a break-down for the lengths of each section on the track.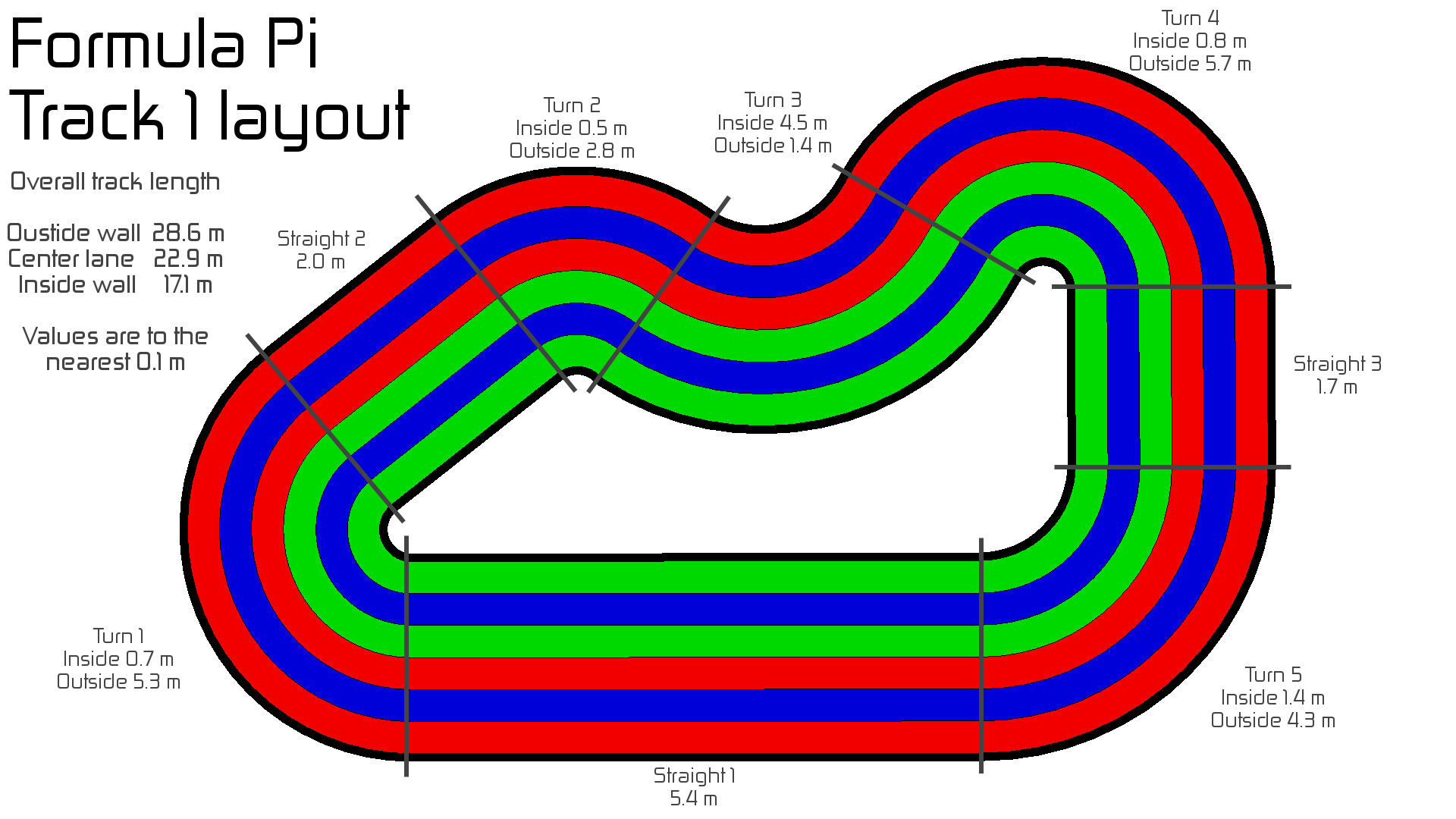
Each of these reference points on the track also has an associated waypoint number.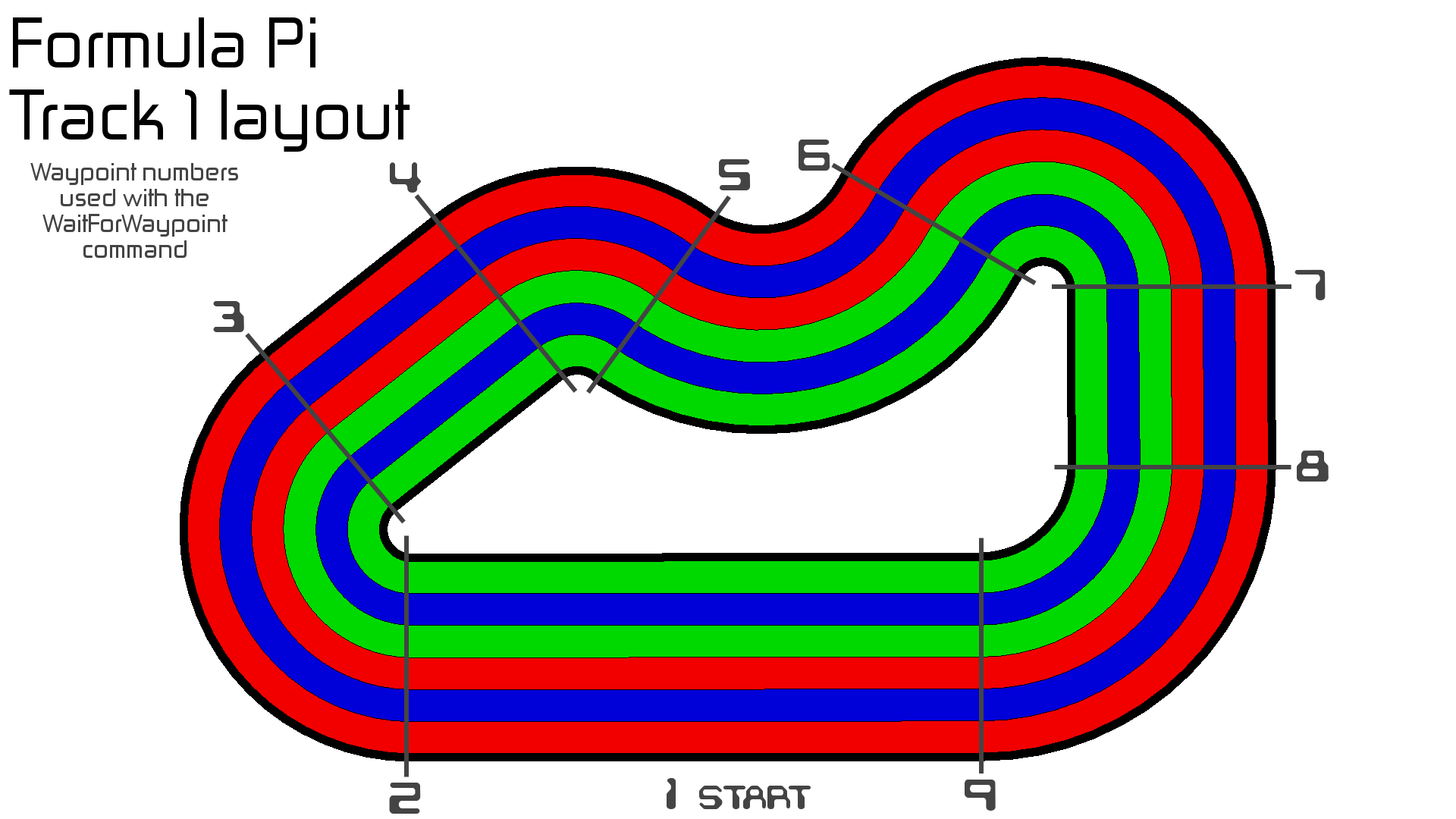
The waypoint numbers can be used with our Race Code Functions to direct the YetiBorg around the track without complicated maths.
Here is our quick example for track 1:
#!/usr/bin/env python # coding: Latin-1 ### Settings for this race ### laps = 10 ### Start of the race ### if TrackFound(): # We can see the track, start by following the lane we are on trackLane = round(CurrentTrackPosition()) AimForLane(trackLane) else: # Cannot see the track, aim for the center instead (stopgap measure) AimForLane(0) # Save a start-line image photo = GetLatestImage() SaveImage(photo, 'Start-line.jpg') # Start logging what happens StartUserLog() StartDetailedLog() # Wait for the go signal from the start/stop lights. WaitForGo() # Go at max speed Speed(100) ### During the race ### # Keep going until we have fished all of the laps while LapCount() < laps: # Full speed to the first corner Speed(100) WaitForWaypoint(2) # Slow down, move to the inside and wait for the apex Speed(80) AimForLane(-2) WaitForWaypoint(3) # Speed up and move to the center until the S curve starts Speed(100) AimForLane(0) WaitForWaypoint(4) # Move towards the outside until the S curve changes AimForLane(+1) WaitForWaypoint(5) # Move towards the inside until the S curve ends AimForLane(-1) WaitForWaypoint(6) # Slow down and move to the inside around the corner Speed(70) AimForLane(-2) WaitForWaypoint(7) # Speed up for the back straight along the center Speed(100) AimForLane(0) WaitForWaypoint(8) # High speed for the last corner on the inside Speed(90) AimForLane(-2) WaitForWaypoint(9) # Full speed until the start/finish line along the outside Speed(100) AimForLane(+2) WaitForWaypoint(1) ### End of the race ### # Save a finish-line image photo = GetLatestImage() SaveImage(photo, 'Finished.jpg') # Slow the YetiBorg down gradually from 100% to 0% for slowing in range(99, -1, -1): Speed(slowing) WaitForSeconds(0.01) # Stop the logging EndUserLog() EndDetailedLog() # End the race (will stop the robot and end the program) FinishRace()
Comments
Syd Fraser (not verified)
Mon, 28 Oct 2019 - 21:00
Permalink
Future...?
I am interested by your project for our Young Engineers Club at Grampian Transport Museum in Alford. However, the Github link seems to be dead and I just wondered if it is possible to download the code somewhere else?
Arron Churchill
Tue, 29 Oct 2019 - 10:25
Permalink
Formula Pi code
The full source code has only been made available to competitors.
We do have a camera based self-driving code example available to everyone on GitHub, MonsterBorg Self-drive, which is essentially a simplified version of the Formula Pi race code.
Add new comment