
Formula Pi final - Summer 2017

Tomorrow (Wednesday 19th of July 2017 at 18:30 BST) is the final race of the Summer 2017 Formula Pi series.
Once again it's down to the final five robots battling it out in the ultimate coding challenge!
The team at PiBorg started FormulaPi to fill a gap they saw in the Maker Community. There are many wonderful events such as PiWars which allow people to build robots and test out their hardware hacking skills against each other, but there was nothing incorporating the Raspberry Pi which allowed community members interested in software development to compete in similar ways. PiBorg's Tim Freeburn said "I've always been a fan of racing ever since my Dad took me to race meets when I was younger, and that interest has never diminished. With the rise of autonomous driving and projects such as Google's Waymo self driving car and Tesla's Autopilot made me think could we build a similar community led race series allowing people to learn about autonomous driving through racing. From that Formula Pi was born."

Formula Pi is a remotely run self driving race series designed for software developers to flex their racing prowess. Anyone can enter the race series, and on entry they are provided with a base library written in Python. People are free to edit the code however they choose;
- They could change nothing and race that code.
- They could change a few specifications for how the car moves, such as lane choice or speed at sharp corners.
- Or they could rewrite the libraries from the beginning and provide their own design of autonomous driving code.
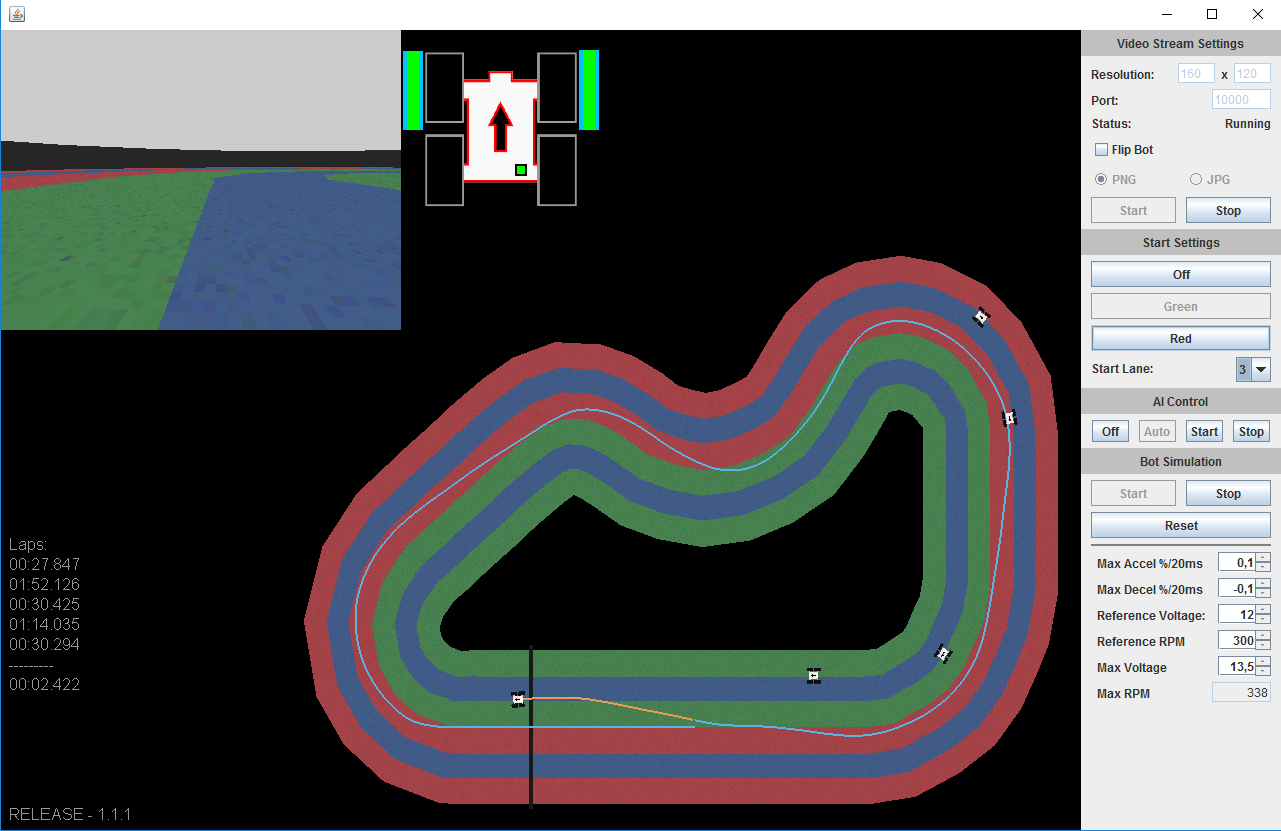
As not everyone will have access to their own track the lovely Tim Pearce has written a simulator to allow racers to test their code to see how it might perform on the track. Along with this simulator racers get dedicated track time before each race to fine tune their code.
There are set deadlines that code must be submitted by in order to race, and once that code is back with us, the racing can begin! All the testing and races are broadcast on our YouTube Channel Live so you can watch all the action unfold.
Changes for Season 2
The team at PiBorg who run FormulaPi have changed the format slightly from last year as well as adding an additional faster class to the race series. After passing out surveys to competitors and spectators alike, we took all the feedback on board and made some subtle changes to the series.
Firstly, there were requests for more testing time on the track. In the first season we had 2 testing sessions before 5 racing rounds, which didn't give racers enough of a chance to really experiment with their code without compromising their race runs.
To allow people to test out simple changes or more extreme code changes or entirely new libraries we added 5 testing rounds and reduced the number of races to 4. There were 2 testing sessions before racing got underway to give people a chance to learn about the simulator, track procedures and how racing would run, and also to have a bit more experimentation with the robots. This meant that we saw a lot more progression as the series went on and racers were really upping their game between each round.
Along with the new race format, the robots had and overhaul too. We have been running two classes of robots; the YetiBorg and MonsterBorg.
The YetiBorg is the original robot run from the first series of Formula Pi run over Winter 2016. These robots use the Raspberry Pi Zero, 6V 180rpm motors and our ZeroBorg motor controller. These robots can process images at around 5-7fps from the Raspberry Pi to guide them around the track, and this is the only input available to the robots to work out which way to go around the track. The YetiBorgs are run as one class, and we recommend this class for beginners or people learning about autonomous driving for the first time.
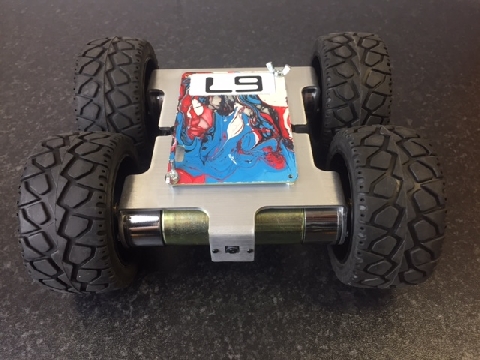
The next class is using our successful Kickstartered robot the MonsterBorg. This is the big brother of the YetiBorg which has a Raspberry Pi 3 at its core with 12V 300rpm motors controlled by our ThunderBorg motor controller. These robots are faster than the YetiBorgs and prove much more of a challenge to racers. The code needs to be much more responsive to changes in the track lines, and with the Pi 3 processing images from the Raspberry Pi Camera at up to 30 fps, the robots have the capability to be much more agile! This extra speed has caused some spectacular crashes and even some robots being ejected from the track into the gravel traps.
Summary of series so far
There have been 4 rounds broadcast so far, and they have been far more varied than I expected, particularly during the MonsterBorg races. The crashes and punting of robots over he barriers really mixed things up and made for some very exciting races. With the crashes, it really highlighted the need for some sort of avoidance code to detect piles of tangled robots and avoid them. A few competitors did this successfully and it really made a difference during racing. Ending up in the gravel has now become a real concern, and sadly if you get tangled up with another robot and they've got their elbows out, it's only luck which will keep you from ending up over the guard rail. Thankfully this only happened twice during the heats.
The elimination rounds were absolutely fantastic and really tense towards the end. The top 5 robots were separated by less than 7 seconds, which shows how hard everyone has been working to get the fastest code. The winning MonsterBorg robot through the eliminators was The IT Guy who gave us all a heart attack when he mounted the barriers 3 times, but still managed to put in the fastest 7 out of 10 laps.
The YetiBorg class really is up for grabs from any of the competitors this year, they are so evenly matched and using differing strategies to great effect, this race will be interesting to watch from line choice and strategies which will emerge from the competitors.
The MonsterBorg class is also very close. From watching the eliminators, it seems all bar one robot has the same strategy; inside line as soon as possible. There will be crashes, it's going to be a case of whoever survives the first corner and gets out quickly will probably win the race!
I'd really like to highlight Saska from the MonsterBorg class as being one of the racers who missed out on the final by just 4 seconds, but had some absolutely fantastic results during the heats, and at 14 years old they really showed coding prowess beyond their years. Hopefully we'll see you in next year's racing!
MonsterBorg class finalists
The Hayler-GoodallsFormula Pi veterans The Hayler-Goodalls from Surrey in the UK made it into last year's final and came 5th and are back for more this year. With really consistent results week in week out, they finished a well deserved 5th place in the heats and managed a Formula Pi first when they punted MotoToastie over the rubber guide rails around the track and into the gravel in the centre of the track. In the Eliminators the Hayler-Goodalls put in a very competitive time of 104.73 only 3.24 seconds behind The I.T. Guy and getting very close to the guide rails. They're looking quick and will be pushing The I.T. Guy hard in the final. |
||
 |
 |
|
iHAV5We were so pleased iHAV5 made it into the final this year. From San Jose, California, USA who work at NextEV the autonomous electric vehicle company, narrowly missed out on the final last year, but did enough this year to make it into the eliminators coming 11th in the heats. Despite only just getting in, they pulled it out of the bag and put down a fantastic time of 106.22 coming 3rd in the eliminators, only 5 seconds off The I.T. Guy's fastest time. We're looking forward to seeing how they fare in the final. |
||
 |
 |
|
Lambda.p.racingThe only finalist in this year's Formula Pi to be using something other than Python in their code base, the Lambda.p.racing team are using a wholly Java based library designed by the team which is incredible. It has had teething problems along the way, but the extra testing time on the track this year has really helped enable them to perfect this library and has helped get them into the final. The team are from Bern in Switzerland and Hamburg in Germany, and came 10th in the heats with a mixed bag of results, but come the eliminators they set a fantastic time of 108.4 seconds to take the last spot available for the final. We're really excited to see how they get on against the other Python based robots. |
||
 |
 |
|
RasPerras del InfiernoYet another Formula Pi veteran, RasPerras del Infierno are back for more racing this year. Coming 3rd in last year's competition, they're looking for more this year in the final. They made steady progress through the heats to finish 7th overall and put down a solid time of 106.41, only 0.19 behind iHAV5, to place them 4th in the eliminators. We'd like to say a big thank-you to Jorge from this team for all his help with the timing spreadsheet, and for reminding us to clear the track timers :) |
||
 |
 |
|
The I.T. GuyControlled chaos are the two words we would use to describe The I.T. Guy team from Independence, Oregon, USA. Their first heat they managed to get a 3rd place, despite losing a wheel early on they manged to complete the race and not come last! After this their results got better and better, eventually placing them 2nd overall in the heats. Also during testing, they broke the lap record for MonsterBorgs which stands at an astonishing 13.63 seconds. The Eliminators were frankly terrifying, and despite mounting the barriers and nearly pitching their robot into the gravel several times The I.T. Guy got the fastest overall time at 101.49 seconds. As long as they're not too over ambitious come the final, The I.T. Guy is a strong contender for the win. |
||
 |
 |
|
GrandPi class finalists are
AutologicHailing from Wheatley, Oxfordshire in the UK, they have named the team after Autologic - the company they work for, who specialise in engine diagnostics hardware to fix engine problems. Listing their hobbies as novel coding projects, they naturally turned to Formula Pi for a challenge. A mixed bag of results in the heats placed them 4th going into the Eliminators, but they stepped up for the Eliminators coming 2nd with a time of 176.9. They're not to be ruled out and expect them to be challenging Les roues carrées all the way to the line. |
||
 |
 |
|
Les roues carréesNamed as a tribute to their local football team "Les pieds carrés" (which literally translates to "Clumsy Feet") the "Clumsy Wheels" have been anything but clumsy with their performance in this season's Formula Pi. Finishing top of the leaderboard in the heats and obtaining the fastest qualifying time in the Eliminators with 169.12 seconds, the French team from Villaroche, which is just south of Paris, work as aeronautics engineers by day and have experience in embedded C, but are relatively new to Python. Along with breaking the lap record and setting a quick 22.43 second lap, they're the hot favourite to take this year's YetiBorg Class title. |
||
 |
 |
|
B-BOTB-Bot dominated the first couple of heats in the YetiBorg class, but suffered in the last half with technical issues, placing them 3rd in the Heats. Their form returned for the Eliminators and managed another 3rd place only 2.78 seconds behind Autologic with a combined time of 179.68. The team are from Painted Post, NY, USA and have one of the best looking YetiBorg lids with a robot adorned with a diamonte! With their early form in the heats, you can't rule them out for a surprise turn of fortune in the final. |
||
 |
 |
|
Paxo ParrotTheir performance has been far from the stuffed bird of their namesake, Paxo Parrot obtained 2nd in the heats battling constantly with Les Roues Carrees for position and providing some excellent racing. The Eliminators didn't quite go as well as they expected and ended with a time of 197.60 seconds, but that's not to say they can't turn it around come final time. |
||
 |
 |
|
SparkCCOur sole finalists from the Southern hemisphere and a team who run their own makerspace in the Central Coast of New South Wales in Australia, SparkCC came 5th in the heats and seemed to do well in testing, but struggled to convert it to performance in the heats. They also got a 5th place in the eliminators with a time of 207.15, which clinches them the final place in the YetiBorg final. It's all to play for on Wednesday for SparkCC. |
||
 |
 |
|
The top 3 from each class will receive a glamorous Formula Pi trophy, along with a prize! There are some really great prizes - including a MonsterBorg, IQAudio boards and PiBorg Motor controllers.
Where to find it
The Formula Pi final race will be broadcast live on YouTube on the 19th of July at 18:30 BST and will be available for replay immediately after the finals.
If you'd like to get involved the Formula Pi website is the place to start!
What's happening next season
After the dust has settled on the finals, we've got some very exciting projects in the pipeline which we will be announcing as soon as we can.
We've got new additional technology to wrangle into shape for the Winter 2017 series starting in October. We are hoping to have the following in place:
- Pozyx tags (Ultra Wide Band localised GPS) for each robot so we can easily locate the robots during racing. Which should make it easier for you to follow which robot is where and it will enable us during racing to have split times, sector times, and all sorts of other timing goodies.
- IMU (Inertial measurement units) to give accelerometer and gyroscopic feedback, providing additional information to racers about how the robot is performing.
- Faster robots; we will likely be retiring the YetiBorgs and putting an even faster robot above the MonsterBorg class! This is very much in development, but we're doing everything we can to get it running in the next series.
If you’re really passionate about learning more about Advanced driver-assistance systems and self-driving technology, our friends at Self Driving Track Days will be running a workshop on 28 July near Vienna, Austria, where you can talk to engineers working on the technology, see demos, and ride in autonomous cars! You can find out more and book at Self Driving Track Days
If you are interested in entering the next series of Formula Pi head to our shop to enter, or check out the Formula Pi website for more information.
Comments
awood85
Wed, 19 Jul 2017 - 11:54
Permalink
Changes for next season
Really like the sound of more sensors! Things should get a whole load more accurate when it comes to racing and positioning.
Looking into the Pozyx tags am i right to assume the additional IMU data would be coming from these boards? Will all the Pozyx data be available on board or is that a race control only set of data? (they're a bit costly to add to our own robots for testing unfortunately)
Given the option I think I'll be sticking with the Monsterborgs, I feel I need to tame that beast before moving on! I'm pushing hard to improve things but its a risk too!
Good luck to all the finalists! See you all online tonight!
Arron Churchill
Wed, 19 Jul 2017 - 13:01
Permalink
New robots
The new robots are still in the design stages, so all of this is open to changes still.
At the moment the idea is to make the full Pozyx library available, but the standard Race Code Functions will be extended to add the IMU data and a computed track lane plus position from the X,Y coordinates. Hopefully this would keep things simple but also allow people top do more complex processing if they wish.
We will also be looking to see if the simulation can be extended to add some of this data as well, but getting the new robots up and running will be the priority :)
Add new comment